脳外科手術シミュレータの開発
Japanese/English
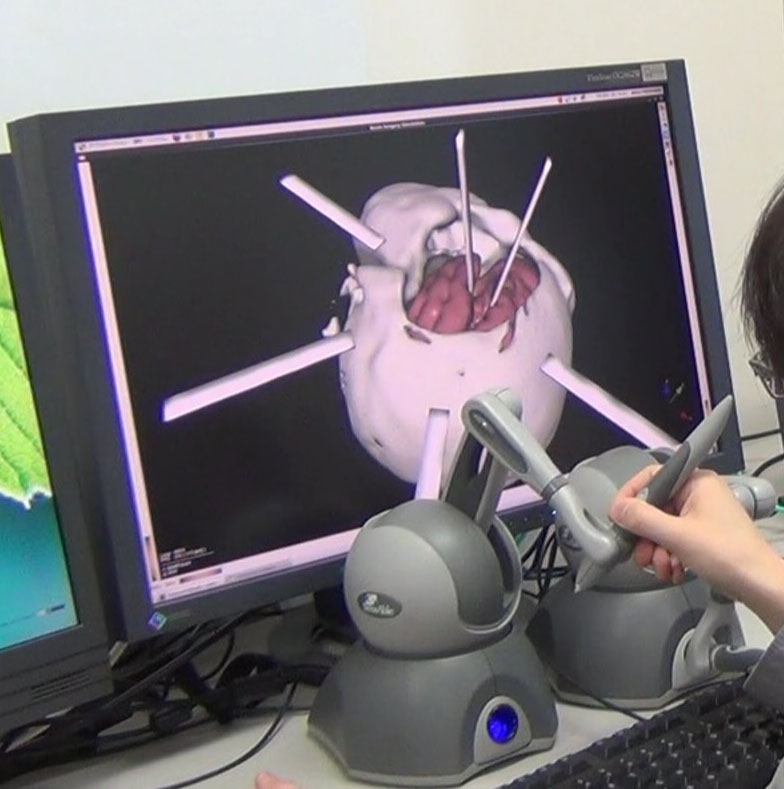
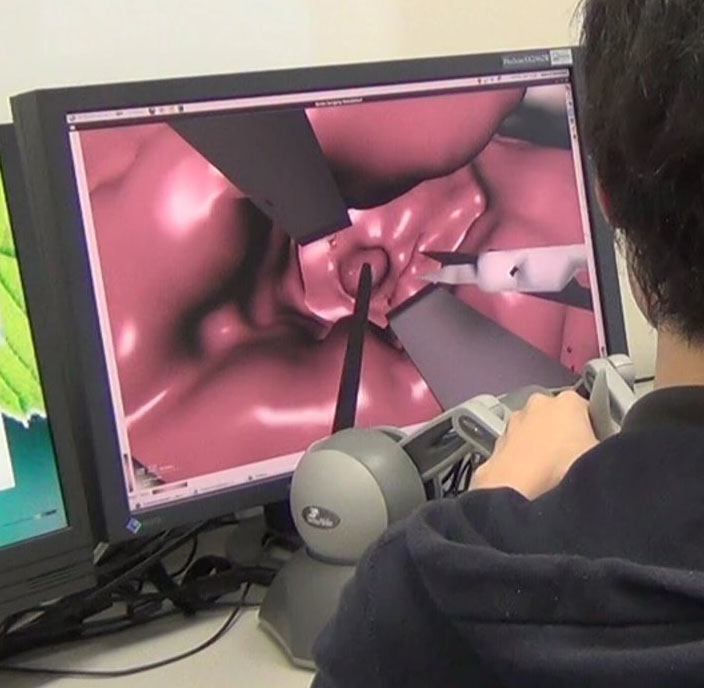
図1 開発中の脳外科手術シミュレータ
近年,安全で効率的な医療を実現する技術として手術シミュレータの注目が高まっている.
手術シミュレータは,バーチャルリアリティ技術を応用し仮想的な手術環境を構築するシステムである.
本システムは,臓器挙動の物理シミュレーションを行い,コンピュータグラフィクスにより仮想手術環境を表示する.
さらに,力触覚提示装置を用いることで臓器に触れた感覚を提示し,実手術の模擬体験を提供することが可能である.
手術シミュレータは以下のような応用が期待されている.
1.手術トレーニング
外科手術では高度な知識と技能が要求される.
熟練医師は,視覚情報や臓器に触れた際の反力・変形挙動から,病変部の状態や神経の位置などの重要な情報を取得し,的確な判断を行う.
このような知識・技能をトレーニングするためには,従来の模型や動物を用いた方法だけでは不十分である.
手術シミュレータは様々な手術場面を構築することが可能であり,状況に応じたアドバイスや誤った処置に対する警告などにより,効率的な手術トレーニングを行うことができる.
さらに,特定の状況を繰り返しトレーニングすることでユーザが注力したい手術を何度も再現し練習することができる.
2.手術計画の立案と確認
手術は患者の症例や特徴に合わせて適切な処置を行う必要がある.
そのため,手術前に臓器や病変部の可視化を目的としたCTによる断層撮影が行われる.
近年では断層画像を三次元復元した3D CGを用いた高度な可視化が行われ,手術計画に広く利用されるようになった.
これらの三次元データを手術シミュレータに読み込ませることで,患者特有モデルを用いた仮想手術環境を構築することができる.
これにより,皮膚・骨の切開や臓器圧排シミュレーションよるアプローチ方法の検討や,患者特有モデルによる手術操作の練習が可能となる.
本研究室では脳外科手術シミュレータの研究と開発を行っている.
脳外科は,脳血管疾患が日本における死因で上位に位置することや,手術が患者の生活に与える影響が大きいことから,特に手術シミュレータの導入が期待されている分野である.
研究成果
1.鈍的剥離操作シミュレーションのための変形・破壊モデル [6], [7]
外科手術において剥離は基本的な操作の一つである.
剥離にはハサミなどを用いた鋭的剥離(切断)と,組織の壊れやすい部分に応力を集中し,選択的に破壊する鈍的剥離がある.
鈍的剥離は力加減の調整に経験が必要であり,誤った操作によって重要な部位の損傷を招く危険性がある.
本研究室では,手術シミュレータにおいて鈍的剥離を行うための変形・破壊モデルを開発した.
本モデルは有限要素法による応力解析に基づいた手法であり,鈍的剥離の表現に適している.
また,剥離の進展に伴う不安定性を回避することで安定な剥離シミュレーションを実現した.
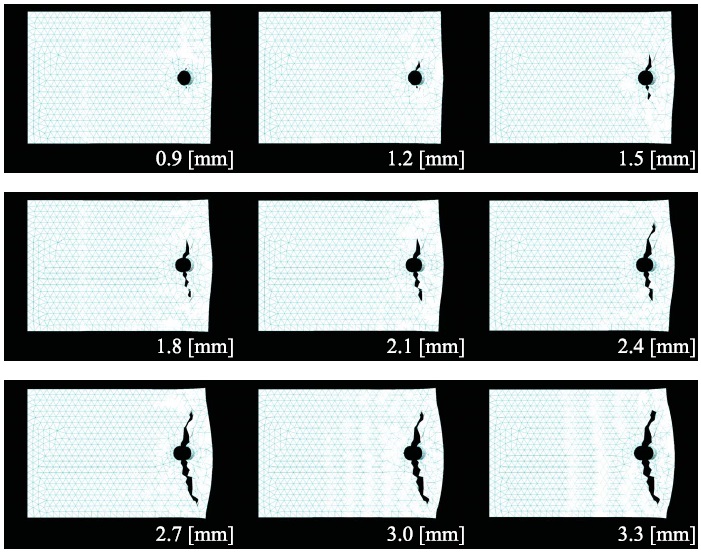
図2 開発した破壊モデルによる破壊シミュレーション [7]
2.生体組織の粘弾性モデルの開発とパラメータ同定 [5], [8]
脳実質の粘弾性を考慮した変形計算を行うため,粘弾性モデルの開発と粘弾性パラメータ同定を行った.
粘弾性モデルは有限要素法に基づいた方法を採用し,本研究室で開発した破壊モデルとの組み合わせが可能である.
また,生体組織の材料試験を行い,試験データに基づく粘弾性パラメータ同定手法の提案と数値モデル評価を行った.
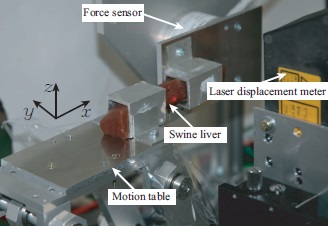
図3 生体組織の材料試験 [5]
3.粒子法ー有限要素法連成解析手法の開発 [JKA 補助事業 PDF]
この研究は,公益財団法人JKA 平成30年度 粒子法−有限要素法連成解析手法の開発補助事業(2018M−156)の助成を受けて行われました.
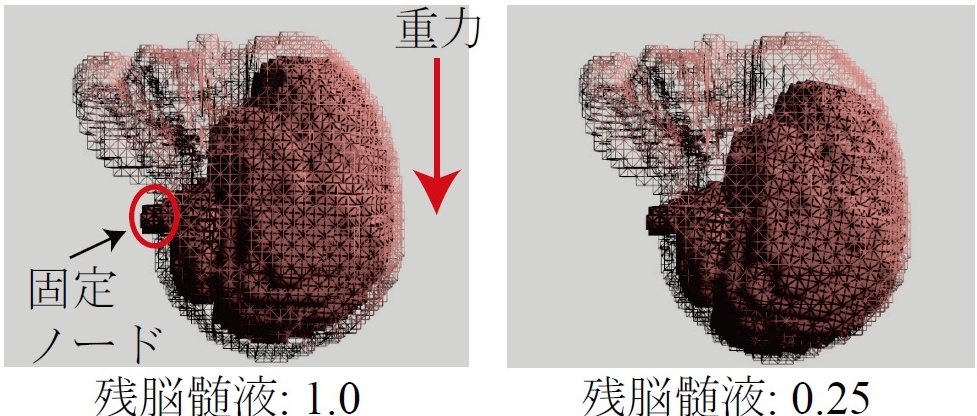
図4 ブレインシフト推定シミュレーション
現在の研究
脳外科手術の基本的な手術場面の再現を目指した要素技術開発とシステム統合を行い,両手操作可能な脳外科手術シミュレータの開発を行っている.
また,大規模脳モデルのリアルタイムシミュレーションを実現するための並列計算技術や,これまで以上に高精度な粘弾性・破壊モデルの研究開発を行っている.
参考文献
- Takuya Kameyama, Teppei Tsujita, Atsushi Konno, Xin Jiang, Satoko Abiko, and Masaru Uchiyama, Displaying Cutting Force of Soft Tissue Using MR Fluid for Surgical Simulators, Proceedings of the IEEE Haptics Symposium, Houston, Texas, pp. 283-288, USA, February 23-26, 2014.
- Atsushi Konno, Masano Nakayama, Xiaoshuai Chen, Akira Fukuhara, Kazuya Sase, Teppei Tsujita, and Satoko Abiko, Development of a Brain Surgery Simulator, The International Symposium on Interdisciplinary Research and Education on Medical Device Developments, pp. 29-32, Hirosaki, Japan, September 12-13, 2013.
- Teppei Tsujita, Kazuya Sase, Atsushi Konno, Masano Nakayama, Chen Xiao Shuai, Koyu Abe, Masaru Uchiyama, Design and Evaluation of an Encountered-type Haptic Interface Using MR fluid for Surgical Simulators, Advanced Robotics, Vol. 27, No. 7, pp. 525-540, DOI:10.1080/01691864.2013.777013, 2013.
- Teppei Tsujita, Manabu Ohara, Kazuya Sase, Atsushi Konno, Masano Nakayama, Koyu Abe and Masaru Uchiyama, Development of a Haptic Interface Using MR Fluid for Displaying Cutting Forces of Soft Tissues, Proceedings of 2012 IEEE International Conference on Robotics and Automation, RiverCentre, Saint Paul, Minnesota, USA, pp. 1044-1049, May 14-18, 2012.
- Xiaoshuai Chen, Masano Nakayama,Teppei Tsujita, Xin Jiang, Satoko Abiko, Koyu Abe, Atsushi Konno and Masaru Uchiyama, Identification of Physical Properties of Swine Liver for Surgical Simulation Using a Dynamic Deformation Model, Proceedings of 2011 IEEE/SICE International Symposium on System Integration, C9-2, pp.655-660, Kyoto, Japan, December 20-22, 2011.
- Masano Nakayama, Satoko Abiko, Xin Jiang, Atsushi Konno and Masaru Uchiyama, Stable Soft Tissues Fracture Simulation for Surgery Simulator, Journal of Robotics and Mechatronics, Vol. 23, No. 4, pp. 589-597, August 2011.
- Masano Nakayama, Atsushi Konno, Xin Jiang, Satoko Abiko, and Masaru Uchiyama, Linear Elastic Fracture Model for Brain Surgery Simulation, Proceedings of 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary, pp. 333-338, July 3-7, 2011.
- Xiaoshuai Chen, Masano Nakayama, Atsushi Konno, Xin Jiang, Satoko Abiko, and Masaru Uchiyama, Simulation of Surgical Dissection Using a Dynamic Deformation Model, Proceedings of 2010 IEEE/SICE International Symposium on System Integration, Sendai, Japan, pp. 90-95, December 21-22, 2010.
- Shohei Fujino, Daisuke, Sato, Koyu Abe, Atsushi Konno, and Masaru Uchiyama, Displaying Feeling of Cutting by a Micro-Scissors Type Haptic Device, Proceedings of 2008 IEEE International Conference on Robotics and Automation, Pasadena, USA, pp. 2067-2072, May 19-23, 2008.
[ホーム] [論文リスト]
最終更新日:2020年7月29日