Humanoid robots
Japanese/English
Impact motion
Abstract
Humanoid robots are developed to perform tasks in the human environment replacing humans in dangerous and demanding tasks.
Although they are designed to be able to adapt to man-made environments, they are still far from real practical use.
One of the reasons is that they cannot exert forces as large as human beings.
When a robot applies a force statically on an environment, the magnitude of the force is limited by the maximum torque of the actuating motors.
By applying impulsive force, it is possible to exert a large force beyond the limit of the motors.
A motion in which a robot utilizes an impulsive force on the environment is called impact motion.
Utilizing impact motion, humanoid robots' ability to perform various tasks is expected to improve.
Demonstration
In order to show the advantages of impact motion, The drum beating (Fig. 1) and a Japanese martial art Bojutsu (Fig. 2) was performed by the humanoid robot HRP-2 in the Prototype Robot Exhibition in the Aichi Exposition site [2], [5].
Similar demonstration is also performed in 2005 International Robot Exhibition.
|
Fig.1The drum beating demonstration at Aichi Exposition 2005 Movie [mpg] (4.6 MB)Movie [wmv] (5.0 MB) |
Fig. 2 Bojutsu demonstration at Aichi Exposition 2005 Movie [mpg] (4.6 MB)Movie [wmv] (5.0 MB) |


Formulation of impulse and optimal motion generation
In order to exert a desired impulse, we have to know the relationship between the motion of a robot and the generated impulsive force.
Additionally, optimal motion generation while also considering impulse, fall avoidance and minimization of forces reflected to the robot, is needed.
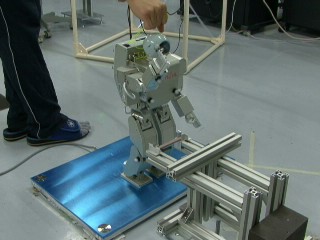
We are studying the hammering (Fig. 3) and the Karate-chop (Fig.4) as a case study of formulation of impulse and optimal motion generation.
|
Fig. 3 The nail-hammering motion by HRP-2 Movie [mpg] (0.8 MB)Movie [wmv] (1.4 MB) |
Fig. 4 The Karate-chop by HOAP-2 Movie [mpg] (0.5 MB)Movie [wmv] (0.5 MB) |

Application of impact motion
In order to improve autonomous behavior and task performance abilities of humanoid robots, we are studying the nail-hammering task (Fig. 5).
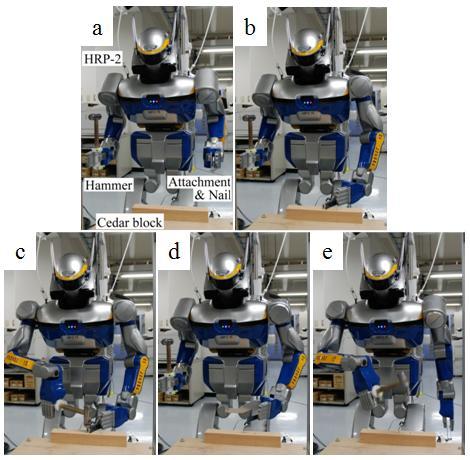
Fig. 5 Sequence of the nail-hammering task
[Home] [Publications]
Last update: 2014/04/01