ヒューマノイドロボット
Japanese/English
インパクト動作
研究の概要
ヒューマノイドロボットは,人間の代わりに過酷な作業を担うことが期待されているが,その能力はいまだ十分とは言えない.
その理由の一つとして,環境に作用させることができる力が人間に比べて小さいことが挙げられる.
ロボットが静的に環境に力を作用させる場合,アクチュエータトルクの限界を超えて力を作用することはできない.
しかし,ロボットの身体を運動連鎖させ,蓄積・伝達される運動量を力積として環境に作用することにより,静的に力を作用する場合の何倍もの力を与えることができる.
我々はこのような動作をインパクト動作と呼び,ヒューマノイドロボットの作業能力向上を目指して研究を行った.
デモンストレーション
インパクト動作の有用性を広く理解してもらうために,愛・地球博(2005年)プロトタイプロボット展において太鼓演奏(図1)と棒術演舞(図2)のデモンストレーションを行った.
2005国際ロボット展(2005年)やこども未来博(2006年)でも同様のデモンストレーションを行った .
|
図1 太鼓演奏の様子 Movie [mpg] (4.6 MB)Movie [wmv] (5.0 MB) |
図2 棒術演舞の様子 Movie [mpg] (4.6 MB)Movie [wmv] (5.0 MB) |


撃力の定式化と最適動作生成
インパクト動作によって任意の撃力を得るには,ロボットの運動とそれによって発生する撃力の関係を明らかにする必要がある.
また,撃力だけでなくヒューマノイドロボットの転倒回避や破壊防止など,種々の要因を考慮した最適な動作の生成が重要となる.
そこで,釘打ち動作(図3)や空手の手刀の動作(図4)などを例として,撃力の定式化や最適動作生成を行った.
|
図3 HRP-2による釘打ち動作 Movie [mpg] (0.8 MB)Movie [wmv] (1.4 MB) |
図4 HOAP-2による空手動作 Movie [mpg] (0.5 MB)Movie [wmv] (0.5 MB) |

インパクト動作を活用した作業
インパクト動作による作業能力の向上とセンサ情報に基づく自律的判断を統合し,具体的な作業の例としてHRP-2による釘打ち作業を実施した(図5).
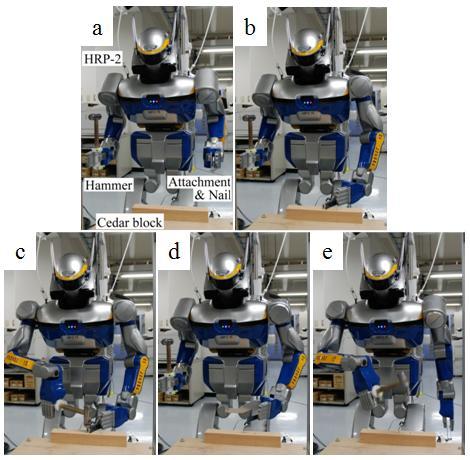
図5 釘打ち作業のシーケンス
[ホーム] [論文リスト]
最終更新日:2014年4月1日